Robots can be classified on the basis of their motion into the following types: (Read in Hindi)
- Stationery Robot- They are further divided into the following types
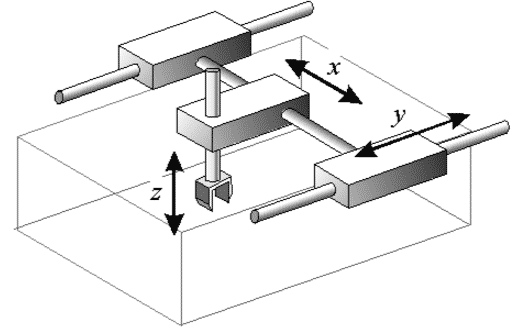
a.) Cartesian Robot: A robot that is capable of moving in the x,y and z directions. It is used for picking up objects and can handle machine tools.
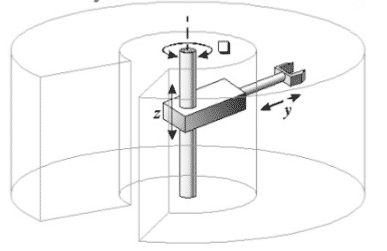
b.) Cylindrical Robot: It is used in assembly lines. It works along the surface of a cylinder.
c.) Spherical Robot/ Polar Robot: They are similar to a cylindrical robot but form a spherical range of motion using a polar coordinate system.

d.) SCARA Robot: It stands for- Selective Compliance Assembly Robot Arm or Selective Compliance Articulated Robot Arm.
The term ‘Selective Compliance’ means that the arm is slightly compliant in the X-Y direction but rigid in the Z direction.
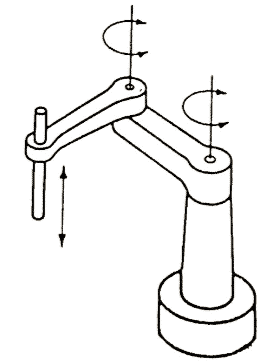
The term ‘Articulated’ means that it has an arm with two joints, similar to the human arm.
e.) Parallel Robot: Two or more robots functioning simultaneously and performing similar tasks.
2. Robots that can move- These are robots
a.) that have single leg/wheel.
b.) that have multiple leg/ wheels.
c.) that can swim.
d.) that can fly.
VIRTUAL ROBOTS
- They are not real but are software related.
- They do not have any physical existence like a two/three dimensional structure.
- For example: a Search Engine, Web Crawler
BEAM ROBOTS
- BEAM stands for Biology, Electronics, Aesthetics and Mechanics.
- They are not industrial robots.
- They are mostly used for hobby purposes.
- They are shaped in the form of a real creature like a frog.

Source: SciencePole Robots can be classified on the basis of their appearance into:
- Humanoid: It appears, behaves and interacts with the environment like a normal human being. It may not have a full human body or a human like face.

2. Android: It looks and acts like a human being and is built with a far more aesthetic sense. If the face looks like a female then it is called a Gynoid. It cannot move its lips or blink its eyes.

3. Actroid: It is android with a strong human appearance. It can blink, smile, speak and sing.

Read More: Types of Robots- Robotics Notes (Part-2)